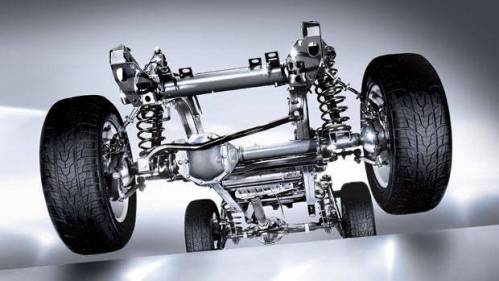
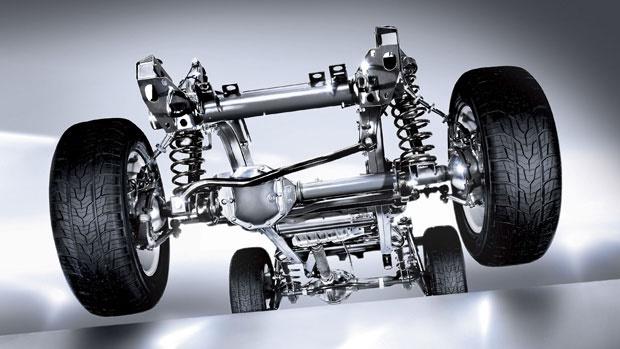
بین سیستم تعلیق اکسل جلو که فرمان پذیر است و ممکن است که محرک هم باشد و سیستم تعلیق اکسل عقب تفاوت وجود دارد. همچنین بین اکسل یکپارچه یعنی سیستم تعلیق ثابت و سیستم تعلیق مستقل تمایز آشکاری وجود دارد. سیستم تعلیق طبق دار دوبل و سیستم تعلیق مک فرسون استرات دو نوع سیستم تعلیق مستقل می باشد که نیاز به فضای کمی در کناره ها و وسط خودرو دارد. در این پروژه به بررسی انواع سیستم های تعلیق با توجه به جلو محرک، عقب محرک و چهار چرخ محرک بودن آنها پرداخته می شود و مزایا و معایب هر یک بیان می گردد. سپس هندسه مرکز و محورهای غلتش بیان می گردد. در پایان حرکت چرخ ها و زوایای چرخ و فرمان و همچنین تاثیر نیروهای مختلف روی تغییرات زوایا و موقعیت چرخ ها بررسی می گردد...
شبیه سازی و آنالیز سیستم تعلیق و فرمان خودرو با نرم افزار آدامز
طراحی و انتخاب کلاچ ها و ترمزها
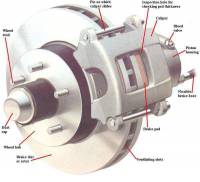
معرفی و بررسی انواع سیستم های ترمز خودرو 
پروژه اصول مهندسی انواع سیستم های تعلیق و محرک، مشتمل بر 2 فصل، 341 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf به ترتیب زیر گردآوری شده است:
فصل 1: انواع سیستم های تعلیق و محرک
- اکسل های عقب و جلو
- سیستم تعلیق مستقل
- نیازمندی های سیستم تعلیق
- سیستم تعلیق طبق دار دوبل
- سیستم تعلیق مک فرسون استرات و استرات دمپر
- سیستم تعلیق بازوی کشنده اکسل عقب
- سیستم تعلیق شبه بازوی کشنده اکسل عقب
- اکسل یکپارچه
- طراحی استاندارد موتور جلو
- مزایا و معایب طراحی استاندارد
- اکسل غیر محرک جلو
- اکسل متحرک عقب
- موتور عقب و مرکزی
- محرک جلو
- انواع طراحی
- مزایا ومعایب محرک جلو
- اکسل جلو محرک
- اکسل عقب محرک
- چهار چرخ محرک
- مزایا و معایب چهار چرخ محرک
- انتخاب دستی چهار چرخ محرک در خودروهای شهری و مسافری
- انتخاب دستی چهار چرخ محرک در خودرو های باری و سنگین
- چهار چرخ محرک دائمی؛ خودروی سواری در اصل جلو محرک
- چهار چرخ محرک دائمی؛ خودروی سواری بر اساس طراحی استاندارد
فصل 2: سینماتیک و الاستو سینماتیک اکسل
- اهداف تنظیمات اکسل
- فاصله بین محور عقب و جلو (wheel base)
- فاصله بین دو چرخ یک محور (پهنای tread)
- مرکز غلتش و محور غلتش
- محور غلتش بدنه
- مرکز غلتش بدنه در سیستم های تعلیق مستقل
- مرکز غلتش بدنه در اکسل های لنگی مرکب
- مرکز غلتش بدنه در اکسل های یکپارچه
- کمبر
- مقادیر و داده های کمبر
- تغییرات سینماتیکی کمبر
- محاسبه تغییرات کمبر توسط طراحی
- کمبر غلتشی هنگام دور زدن
- کمبر الاستیکی
- زاویه سر کجی (toe-in) و خود فرمانی
- زاویه سر کجی و زاویه حرکت عرضی، داده ها و تلرانس ها
- تغییرات سینماتیکی سر کجی (toe-in)
- تغییرات toe-in توسط فرمان دهی غلتشی
- تغییرات toe-in توسط نیروهای جانبی
- تغییرات toe-in توسط نیروهای طولی
- نسبت فرمان پذیری و زاویه فرمان پذیری
- زاویه فرمان پذیری
- track و دایره های گردش
- نسب سینماتیکی فرمان
- نسب دینامیکی فرمان
- راست کننده فرمان
- انحراف و آفست کینگ پین روی زمین
- رابطه بین انحراف و آفست کینگ پین روی زمین (شعاع دوران)
- اهرم نیروی ترمزی
- اهرم نیروی طولی
- تغییرات در آفست کینگ پین
- کستر
- زاویه و کشش کستر
- کستر و حرکت مستقیم
- گشتاورهای راست کننده هنگام دور زدن
- انحراف کینگ پین، تغییرات کمبر و کستر در ورودی فرمان
- تغییرات کستر در مسیر حرکت چرخ جلو
- مسیر حرکت چرخ وابسته به چرخش شغال دست فرمان عقب
- تجزیه نیروی عمودی چرخ روی کستر
- تنظیمات و تلرانس ها
- اندازه گیری کستر، انحراف کینگ پین، کمبر و تغییرات toe-in
- مکانیزم ضد شیرجه و ضد سقوط
- توصیف مفهوم
- قطب pitch جلوی خودرو
- قطب pitch عقب خودرو
بررسی و آشنایی با انواع فنربندی و سیستم تعلیق خودرو
مونتاژ سیستم تعلیق خودرو در نرم افزار اتودسک اینونتور
جهت خرید پروژه اصول مهندسی انواع سیستم های تعلیق و محرک، به مبلغ فقط 25000 تومان و دانلود آن بر لینک پرداخت و دانلود در پنجره پایین کلیک نمایید.
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
بررسی اجزاء ماشین و سیستم های انتقال قدرت
مبانی سیستم انتقال قدرت در خودروهای سواری
طراحی و مونتاژ موتور چهار سیلندر در نرم افزار سالیدورکس
موتورهای هواپیما (پیستونی، جت و ملخ)