برتر فایل
مجموعه فایل های آموزش مقدماتی تا پیشرفته نرم افزار کتیا (CATIA) و مجموعه کتب, جزوات, پروژه و مقالات تخصصی مهندسی مکانیک (ساخت و تولید, جامدات, سیالات)




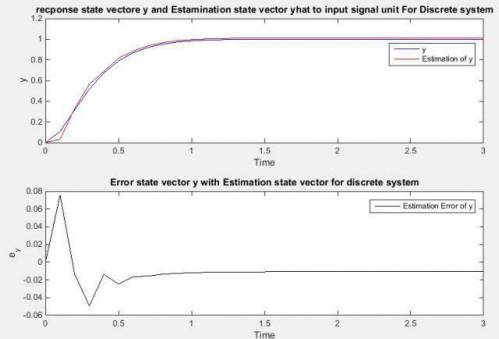
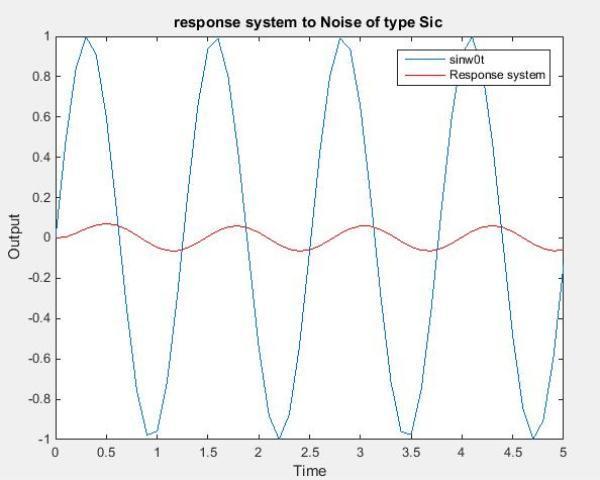
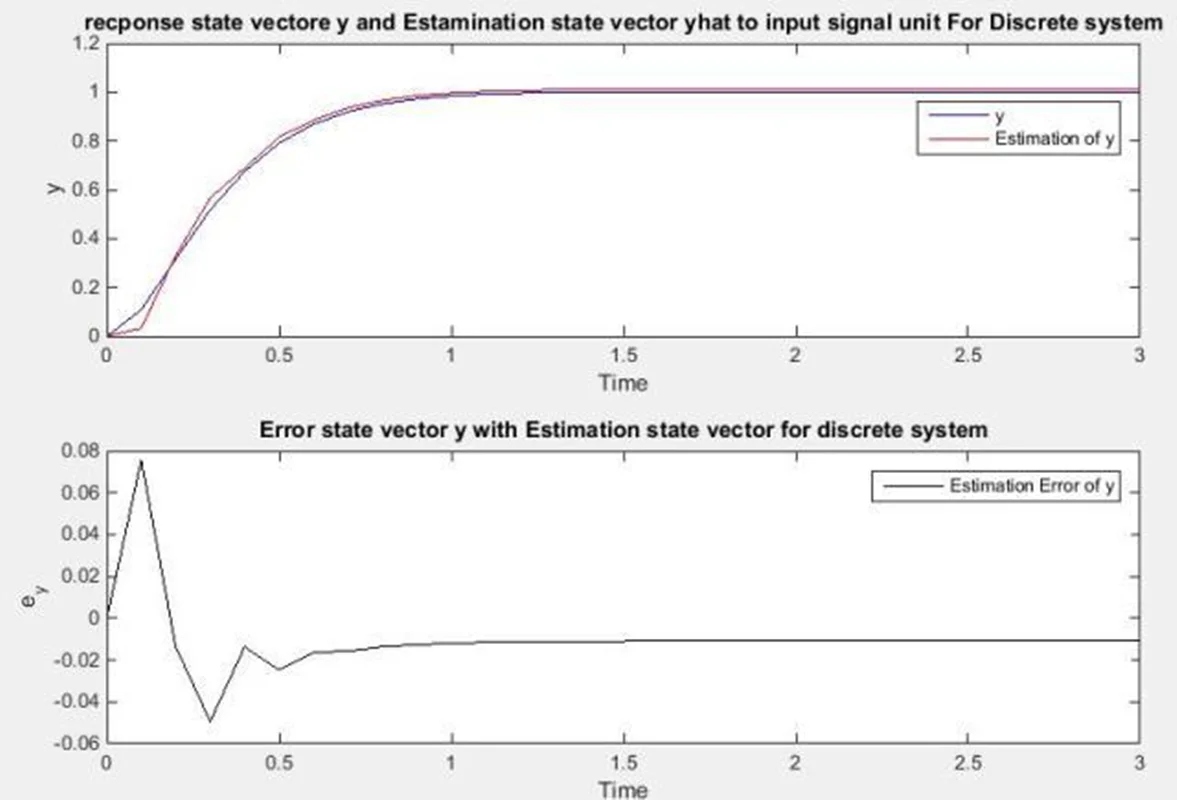
در این پروژه برای مدل تابع تبدیل کنترل کلاسیک، کنترل مدرن و کنترل بهینه در دو حالت زمان پیوسته و زمان گسسته طراحی شده است. ابتدا کنترل PID پیوسته طراحی شده و سپس PID دیجیتال و سپس رفتار سیستم نسبت به دو حالت مقایسه شده و در مرحله بعد کنترل فیدبک حالت و مشاهده گر و کنترل فیدبک با مشاهده گر طراحی شده و همچنین حالت های سیستم را با مشاهده گر مقایسه شده اند و تاثیر نویز و تغییر پارامترها روی رفتار سیستم بررسی شده است. سپس کنترل فیدبک حالت زمان گسسته، مشاهده گر آن و کنترل فیدبک حالت زمان گسسته همراه با مشاهده گر طراحی شده اند و حالت های سیستم را با مشاهده گر مقایسه شده اند. اثر نویز و تغییر پارامترها را روی این طراحی ها بررسی شده است و در آخر کنترل فیدبک حالت بهینه با تابع هزینه دلخواه طراحی شده است و رفتار سیستم با این طراحی را در حضور نویز بررسی شده است. نتیجه ای که گرفته ایم این است که کنترل PID در حذف نویز از سایر طراحی ها موفق تر بوده و کنترل فیدبک حالت نسبت به تغییر پارامترهای سیستم مقاوم تر بوده و از نظر سرعت رسیدن به حالت مانا، SVFC سریع ترین پاسخ را داشته است.
پروژه طراحی کنترلر کلاسیک، کنترل مدرن و کنترل بهینه برای مدل تابع تبدیل در حالت های زمان پیوسته و زمان گسسته و مقایسه آنها در محیط کد نویسی در MATLAB، مشتمل بر 57 صفحه، تایپ شده، به همراه روابط ریاضی و تصاویر با فرمت pdf جهت دانلود قرار داده شده و به ترتیب زیر گردآوری شده است:
بررسی و مطالعه طراحی باتری شارژرهای صنعتی
نحوه کار و کاربرد ماشین های مخصوص

جهت خرید پروژه طراحی کنترلر کلاسیک، کنترل مدرن و کنترل بهینه برای مدل تابع تبدیل در حالت های زمان پیوسته و زمان گسسته و مقایسه آنها در محیط کد نویسی نرم افزار Matlab به مبلغ فقط 25000 تومان و دانلود آن بر لینک پرداخت و دانلود در پنجره پایین کلیک نمایید.
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
كنترل روبات دو محوره با كنترل كننده ي فازي
فاصله سنج اولتراسونیک با قابلیت اندازه گیری دما
طراحی سیستم هشدار دهنده گازهای خطرناک بوسیله پیامک
| modern control design and optimal control for the transfer function model_1590763012_40734_8469_1505.zip1.68 MB |